IntelligensWvetustioRobotiOcalamusA New Era In The SchalybeusSstructuraIindustria
Ferruminatio, ut modus magni momenti ad corpus ferreum connectendum, late in industria structurarum ferrearum adhibita est, et usus roboti ferrariae intelligentis in scaena structurarum ferrearum paulatim promotus est.
Ex prospectu condicionum applicationis, robota soldadurae in constructione, ferro, pontibus, energia electrica, petrochemica, fabricatione autocinetorum, aliisque industriis adhibita sunt. Hodie, fabri structurarum ferrearum capitis paulatim usum robotorum soldadurae promovent ad efficientiam productionis augendam.
Secundum postulationem praesentem, mercatus potentialis robotorum ad structuras ferreas soldandas intra annos XXII fere ad gradum viginti miliardorum pervenire potest.

Credimus spatium mercatus robotorum ferreorum intelligentium, decem miliardorum graduum, paulatim aperiri, et solutiones intelligentes ulterius penetrare exspectari. Suadetur ut artifices attendamus qui technologiam fundamentalem instrumentorum et programmatum robotorum ferreorum intelligentium collegerunt et primi iterationem scaenae assequi possint.
Evolutio inclinationis intelligens, schema roboti soldandi intelligens pergit ad terram advenire.
In industria structurarum ferrearum, inclinatio ad intelligentiam robotarum soldadurae pergit evolvere.
Secundum gradum intelligentiae ab infimo ad altum, robotus soldadurae dividi potest in genus docendi reproductionis, genus programmandi offline, et genus programmandi autonomicum.
Modus docendi input humanum requirit ad omne genus motus perficiendum, informationes tractandas, et memoria roboti repetendas; programmatio sensoriis offline fit ut contenta roboti congruam responsionem moderetur; programmatio autonoma roboti sudatorii in hoc fundatur, facultatem decernendi et consilii ulterius coniungens, computatro uti potest ad eventus sensuum tractandos et ad consilia operis sudatorii designanda.
Credimus in variis generibus robotarum soldadurae, robotas soldadurae praeditos magno gradu intelligentiae adiuvare posse ad sumptus laboris efficaciter minuendos, et esse directionem magni momenti in evolutione robotarum soldadurae.
Automata weldinga intelligentia varietatem technologiarum ferramentorum et programmatum requirunt, et momentum accumulationis technologiae fundamentalis crescit.
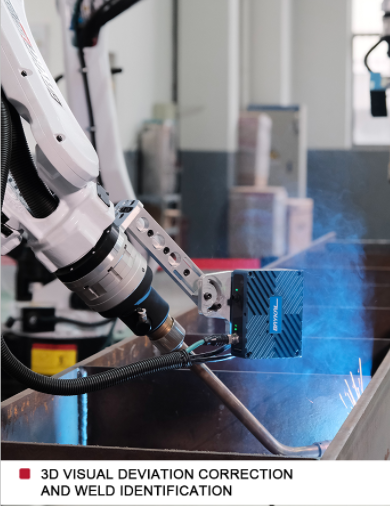
Comparatus cum roboto soldadurae tradito, technologia clavis roboti soldadurae intelligentis postulata altiora pro technologiis intelligentibus conexis proponit, praesertim programmationem offline, positionem visualem, simulationem motus, designationem itineris, moderationem motus, vestigationem soldadurae, et cetera comprehendens.
In usu industriae exsistentis, robota soldadurae intelligens provectior per modulos visuales, programmata programmandi, technologiam intellegentiae artificialis ad docendum simplicem et programmandum automaticum assequendum adhibet.
Sensor ambitum circumstantem sentire potest, et positionem materiae laborandae, vestigationem suturae, aliasque functiones assequi.
Programmata ad soldaduram faciendam celeriter programmare possunt ad vias soldadurae generandas, ita complexitatem docendi et limen usus minuens.
Credimus, cum paulatim liberatio postulationis robotarum soldandi intelligentium, momentum vel ulteriorem emendationem technologiarum programmatum et apparatuum principalium, ut sensus, consilium et gubernatio, fabri cum accumulatione technologiae congruentis exspectari ut ducatum capiant in creandis solutionibus robotarum soldandi intelligentium ad appulsum.
In accumulationem technologiae programmatum et apparatuum plenae copiae et ad adventum scenariorum industrialium intendere.
Dum prospectus intelligentiae robotarum soldadurae pergit evolvere, credimus artifices cum facultatibus fundamentalibus ex progressu intelligentiae plene fructum capere exspectari.
Inter facultates principales sunt hae: 1) facultas programmatum globalis: facultas algorithmorum sentiendi / consiliendi / moderandi evolvendi; 2) facultas programmatum plenae copiae: algorithmus roboticus / systema operandi / intermedia programmata; 3) facultas integrationis programmatum et apparatum: facultas programmatum insertorum / apparatum intelligentem evolvendi; 4) facultas apparatum producendi.
Credimus artifices praeditos facultates praeditos ducere in creando solutionibus robotarum soldadurae intelligentium quae ad deponendum possunt exspectari, et ducere posse in deponendis solutionibus robotarum soldadurae intelligentium vel iterationem in usu accelerare pergere, potentia producti ulterius aucta, et commodum primi motoris crescere pergere exspectari.
Tempus publicationis: XVI Kalendas Decembres, anno MMXXIII