Automatum Sinense Mig Soldandi Altae Qualitatis ad Soldandum Chalybem Inoxidabilem







Corpus Roboticum
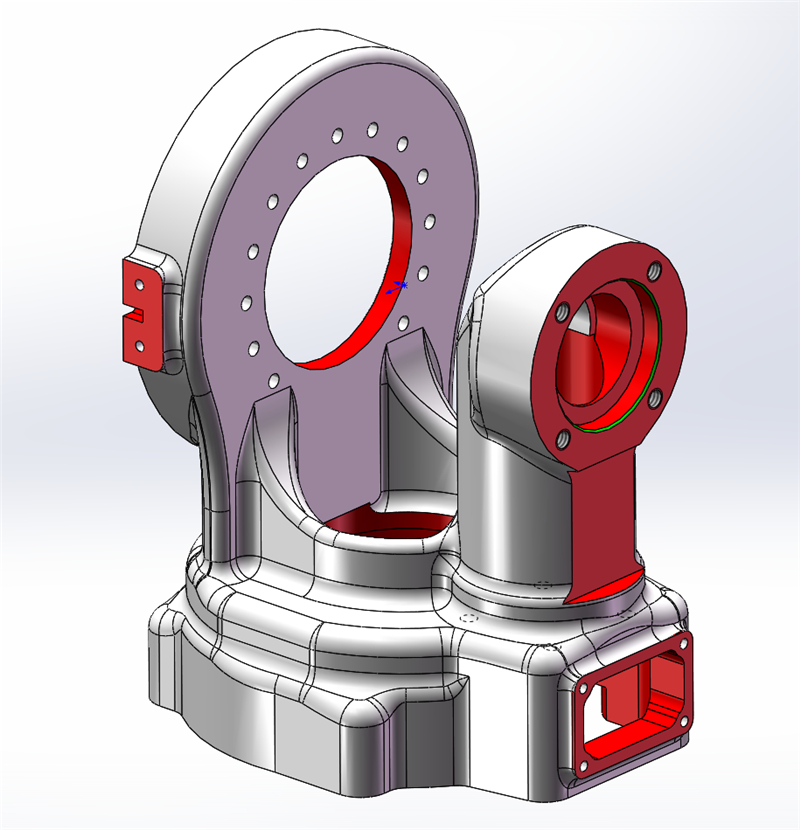
Automatus JHY praecipue in processu fusionis sub pressione et designio particulari corporis mutat. Turma nostra investigationis et progressionis multas innovationes in designio corporis roboti fecit, plus quam decem nova patenta inventionis possidens.
Exempli gratia, sextus axis mechanismum transmissionis summae praecisionis excogitavit et vectes firmantes designavit, insuper discus rotae sextae emissae designum sine dentibus rotariis adhibet, quod accuratiam et stabilitatem roboti magnopere auxit. Etiamsi faces soldandi in positione difficili operatur, stabilitatem tamen sine tremore praestare potest. Hoc punctum a clientibus nostris domesticis confirmatum est.
Corpus roboti technologia fusae sub pressione producitur, quod robots nostros densitate alta et levioribus reddit. Bracchium anterius angustius et longius esse potest, proportio inter bracchium superius et anterius proportioni aureae propior est, ita motum flexibilius et celerius efficit.
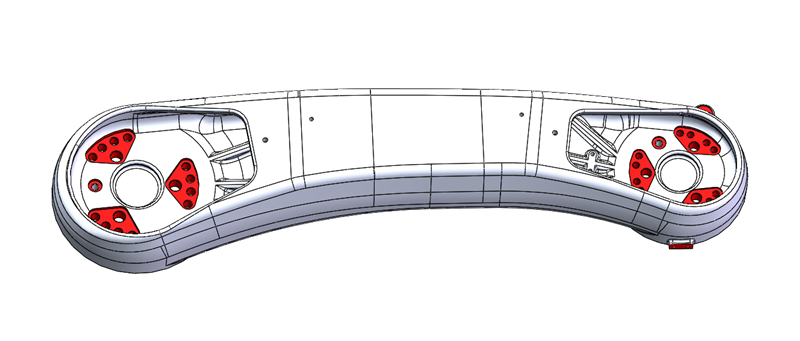
Designatio Adumbrationis
Bracchium anteriorem roboticum rectum simplicius et elegans est. Cum sensu designandi, magis congruens cum aesthetica mercatus Europaei. Corporis robotici designatio, multis patentibus technicis petita, novum corpus roboticum perfectius est.
Optimae Notae Filorum
Fila interna et terminales roboti a praeclaris Iaponicis societatibus fabricantur: DYEDEN, TAIYO, iidem ac ABB et Fanuc.
Terminale: Italica Yierma marca.
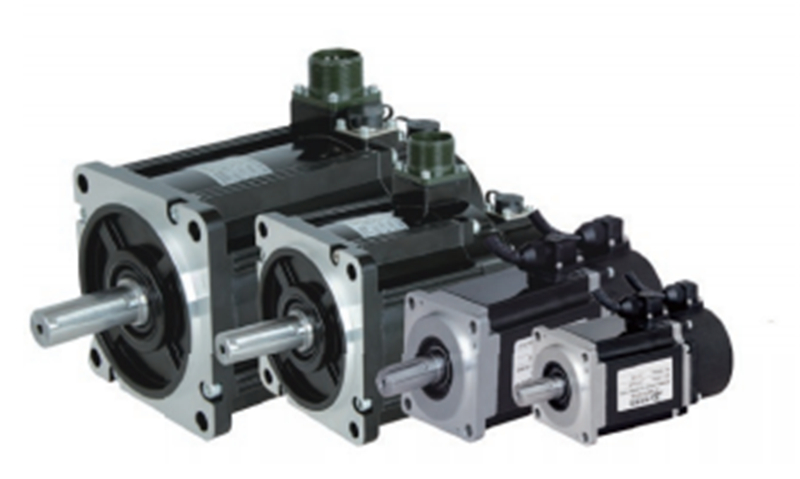
Primae Notae Motorum Servorum / Impulsorum / Reductorum
Omnes praecipuas marcas in Sinis adoptant. Quaeque marca diu probata et investigata est antequam iudicium finale fit, ut hae marcae ad usum robotorum nostrorum aptae sint et qualitas earum atque effectus stabilis et fidus sit.
Axes J1 et J2 designum trium axium eccentricorum cum momento torquendi usque ad 65 Nm adoptant, quod detritionem dentatae minuit et vitam utilem reductoris auget. Reductores axium J1 et J3 roboti JHY nunc sunt configuratio altissima in Sinis.
De servomotore, nunc motorem 3kw ad summum pro robotis utimur.
Pro robotis 1.8m et 2m, vis impulsiva requisita pro axibus primo et secundo maior est, et requisita pro potentia motoris etiam maiores sunt.
Motores altae praecisionis et multi-specificationis postulationibus applicationum pro roboto nostro plene satisfacere possunt.

Tres annos/7500 horas sine cura
Sustentatio est simplex, clientes ipsi facile operari possunt.
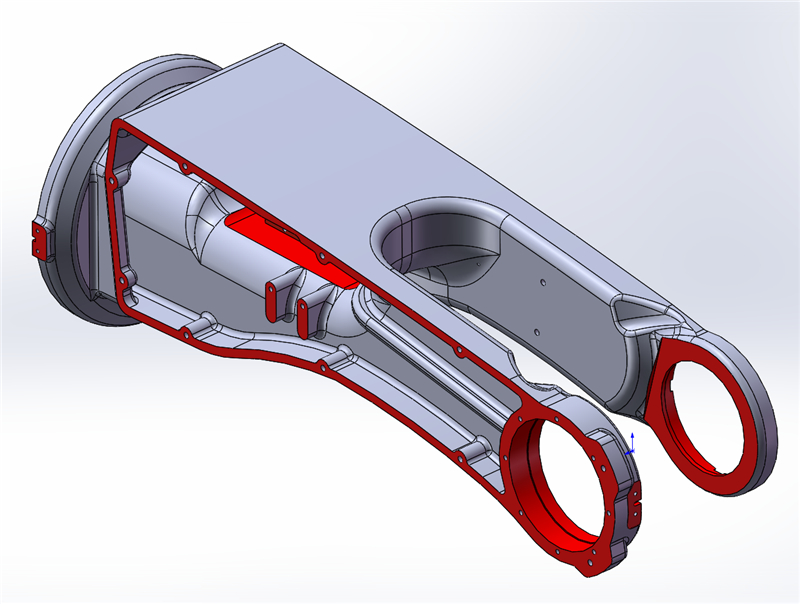
Aliae Patenta et Designia
Transmissio secundaria sex axium Ad duas conexiones cingulae mutata, proportio transmissionis aucta, et problema motus sex axium nimis celeris et imprecisi solvit. Discus emissorius sexti axis sine rotis dentatis designatus est, cum mechanismo transmissionis altae praecisionis, qui accuratiam motus sexti axis auget... In praesenti plus quam triginta patentes pertinentes pro roboto soldadurae habemus.
Video
Parametri
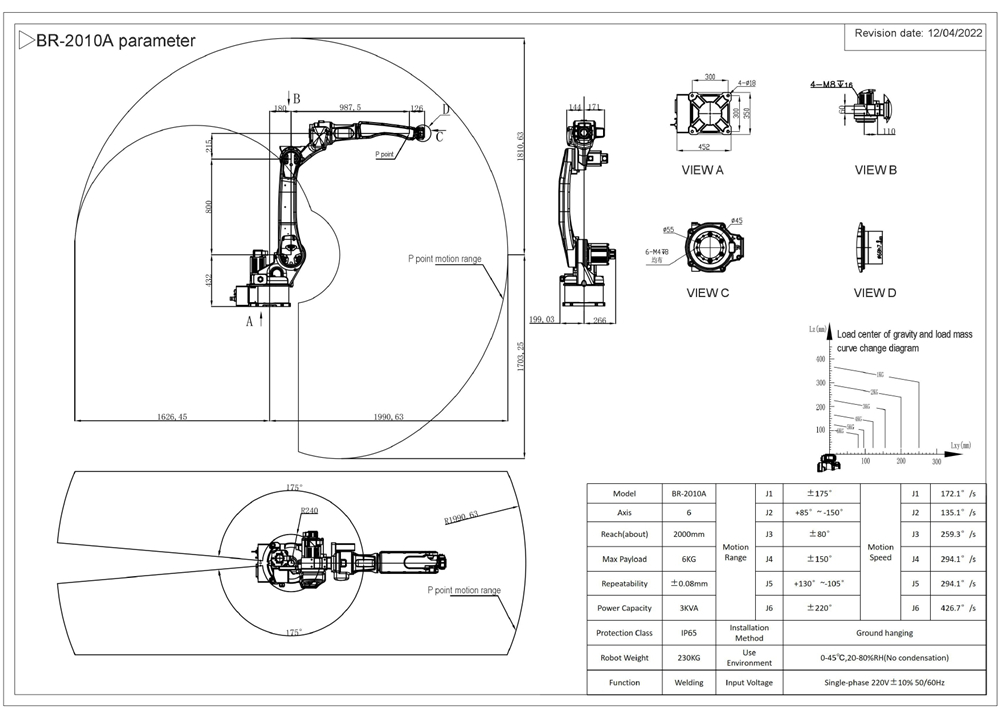
| Modellum | BR-2010A | Ambitus Motus | J1 | ±175° | Celeritas Motus | J1 | 172.1°/s |
| Axis | 6 | J2 | +85°~ -150° | J2 | 135.1°/s | ||
| Attingere (fere) | 2000mm | J3 | ±80° | J3 | 259.3°/s | ||
| Onus Maximum | Sex chiliogrammata | J4 | ±150° | J4 | 294.1°/s | ||
| Repetibilitas | ±0.08mm | J5 | +130°~-105° | J5 | 294.1°/s | ||
| Capacitas Potentiae | 3KVA | J6 | ±220° | J6 | 426.7°/s | ||
| Classis Protectionis | IP65 | Methodus Installationis | Humi suspensus | ||||
| Pondus Robotis | 230 kg | Usus Ambitus | 0-45℃, 20-80% RH (sine condensatione) | ||||
| Functio | Soldatura | Tensio Ingressa | Monophasis 220V±10% 50/60Hz | ||||
Categoriae productorum
-

Robotum sex axium cum sparsione parva et soldatura MIG, amplitudo 1800mm
-

Robotum Saldandi MIG MAG Sex Axium 1500mm cum...
-

Automata soldadurae altae qualitatis ad supellectilem conglutinandam adhibita
-

Bracchium roboticum JHY sex axium, machina automatica arcus industrialis...
-

Automatum soldadurae 2000mm extensionis ad fibras carbonis soldandas...
-

Automatum ad soldaduram MIG cum extensione 2000mm ad ferrum inoxidabile...