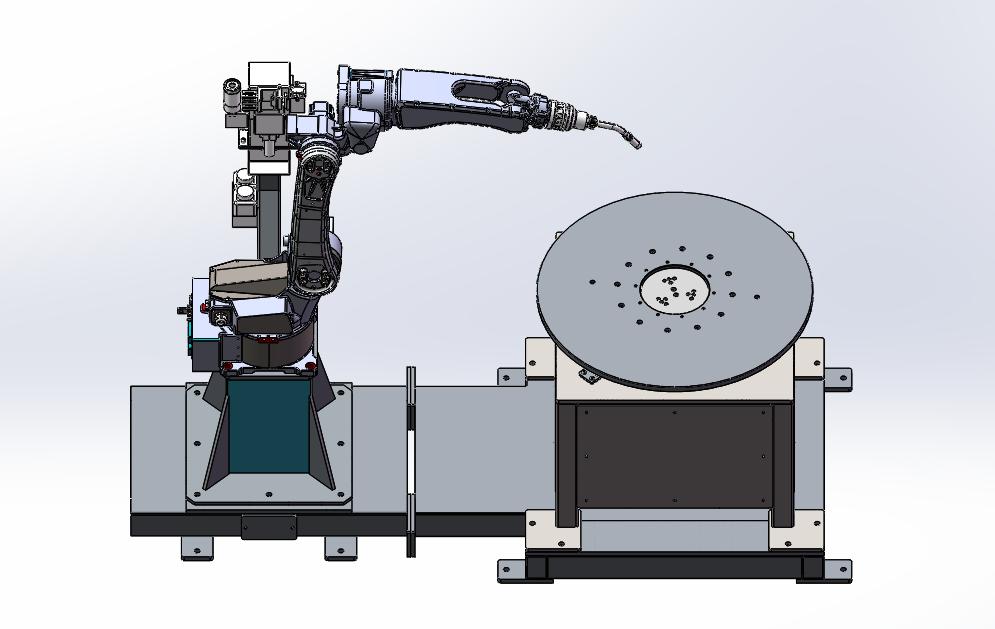
Statio robotica sex axium ad soldaduram aluminii et chalybis inoxidabilis






Characteristica
1. Designatio funis in roboto inclusa permittit robotum moveri sine impedimento et dispositio stationis laboris est nitida et ordinata.
2. Arca gubernationis roboticae usque ad undecim axes moderari potest, vitans complexam debugationem PLC et occupationem spatii.
3. Automatum JHY et positionator synchronizari possunt, et automatum simul suduram facere potest cum positionator rotatur, quo fit ut haec statio laboris ad suduram circularem aptissima sit.
4. Ampla series instrumentorum auxiliarium praesto est, ut sensoria laserica, cortinas lucis securitatis et saepes securitatis.
5. Systema moderandi plures fasciculos processus soldandi continet, qui permittunt ut modi soldandi diversi pro diversis operibus adhibeantur.
Parametrus technicus positionatoris
| Modellum | JHY4030D-080 |
| Tensio Input Aestimata | Monophasis 220V, 50/60HZ |
| Calss Insulationis Motoris | F |
| Mensa Operis | Diameter 800mm (adaptari potest) |
| Pondus | Circiter quadringenta chiliogrammata |
| Onus Maximum | Onus Axiale ≤300kg / ≤500kg / ≤1000kg (>1000kg aptari potest) |
| Repetibilitas | ±0.1mm |
| Positio Sistendi | Quaelibet Positio |
Partes stationis laboris roboticae
1. Automatum soldadurae:
Typus: Robota soldadurae MIG-BR-1510A, BR-1810A, BR-2010A
Automatum soldadurae TIG: BR-1510B, BR-1920B
Automatum ad soldaduram lasericam: BR-1410G, BR-1610G
2. Positor
Exemplar: JHY4030D-080
Typus: Positor rotans horizontalis uniaxialis
3. Fons potentiae soldadurae
Typus: fons potentiae soldadurae 350A/500A
4. Sclopetum soldandi
Typus: sclopetum aere refrigeratum, sclopetum aqua refrigeratum, sclopetum propellens-trahens
5. Statio purgationis faces:
Modellum: SC220A
Typus: Purgator automaticus pneumaticus faces soldandi
Alia peripherica stationis roboticae
1. Ferrivia robotica movens
Exemplar: JHY6050A-030
2. Sensor lasericus (ad libitum)
Munus: suturae vestigatio, positio.
3. Velum lucis securitatis (ad libitum)
Distantia tutelaris: 0.1-2m, 0.1-5m; altitudo tutelaris: 140-3180mm
4. Sepes securitatis (ad libitum)
5. Armarium PLC (ad libitum)
Categoriae productorum
-

Statio Soldaturae Roboticae Mig Tig cum Soldatura Sex Axium...
-

Bracchium sex axium e chalybe inoxidabili, Puls...
-

Automata soldadurae altae qualitatis ad supellectilem conglutinandam adhibita
-

Robotum ad soldaduram laseris pertingens, extensionem 1400mm
-

Machina robotica sex axium ad soldaduram aluminii et chalybis inoxidabilis...
-

Positor soldadurae reductoris RV summae accurati